Upload new firmware from command line #
Instead of using QGC and remove the cable
python3 Tools/px_uploader.py --port=/dev/ttyACM0 build/px4_fmu-v6c_default/px4_fmu-v6c_default.px4Use mavlink console without QGC #
python3 Tools/mavlink_shell.py
Using port /dev/serial/by-id/usb-Auterion_PX4_FMU_v6C.x_0-if00
Connecting to MAVLINK...
NuttShell (NSH) NuttX-11.0.0
nsh>
nsh> Hardware Debugging PX4 code using STM32Code IDE #
Hardware level debugging of PX4 code using STM32 debug ports provide more inside into low level hardware debugging.
Attach to target #
I tried to download and run the code from IDE but it always results in exception. Hence its better to download the px4 code separately and then attach during run time.
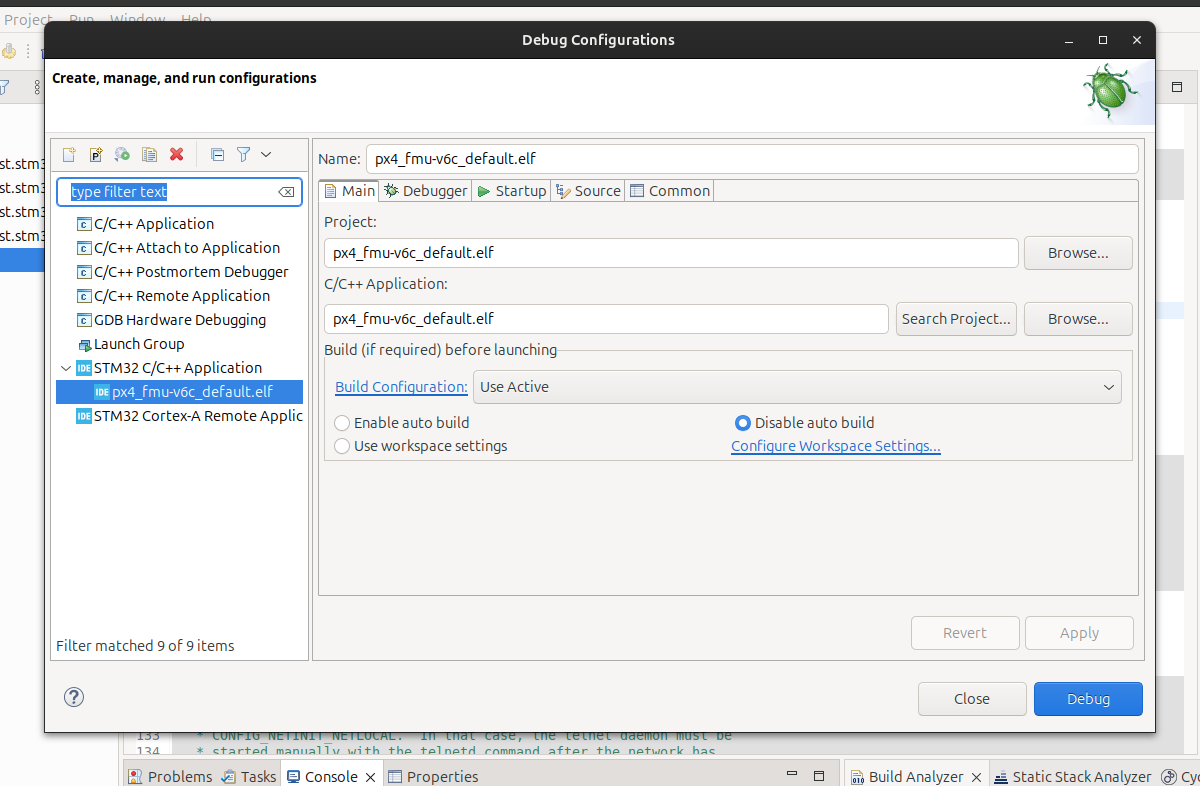
Debug configuration #
Debug Type #
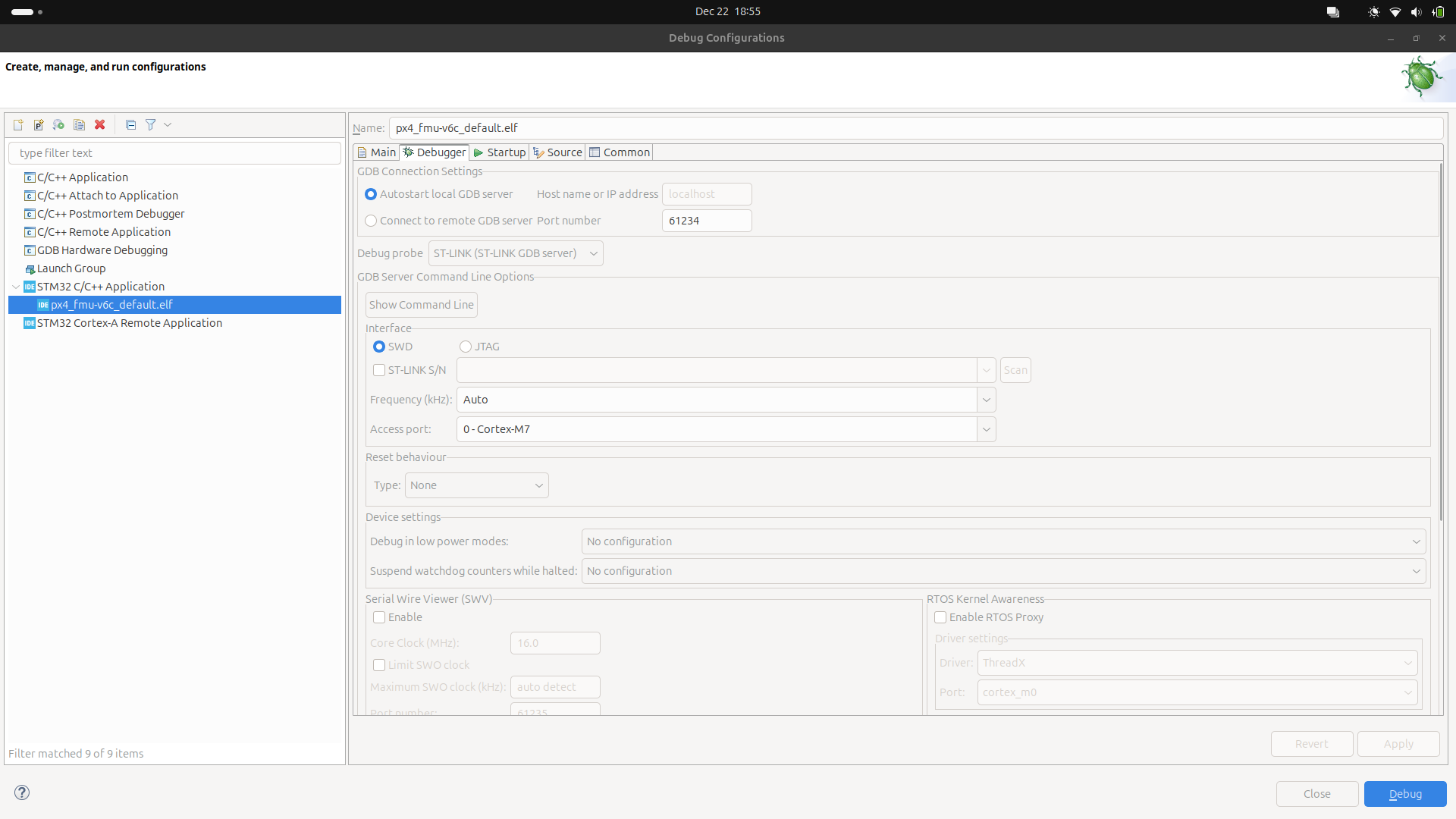
Debugger setting #
Debug settings
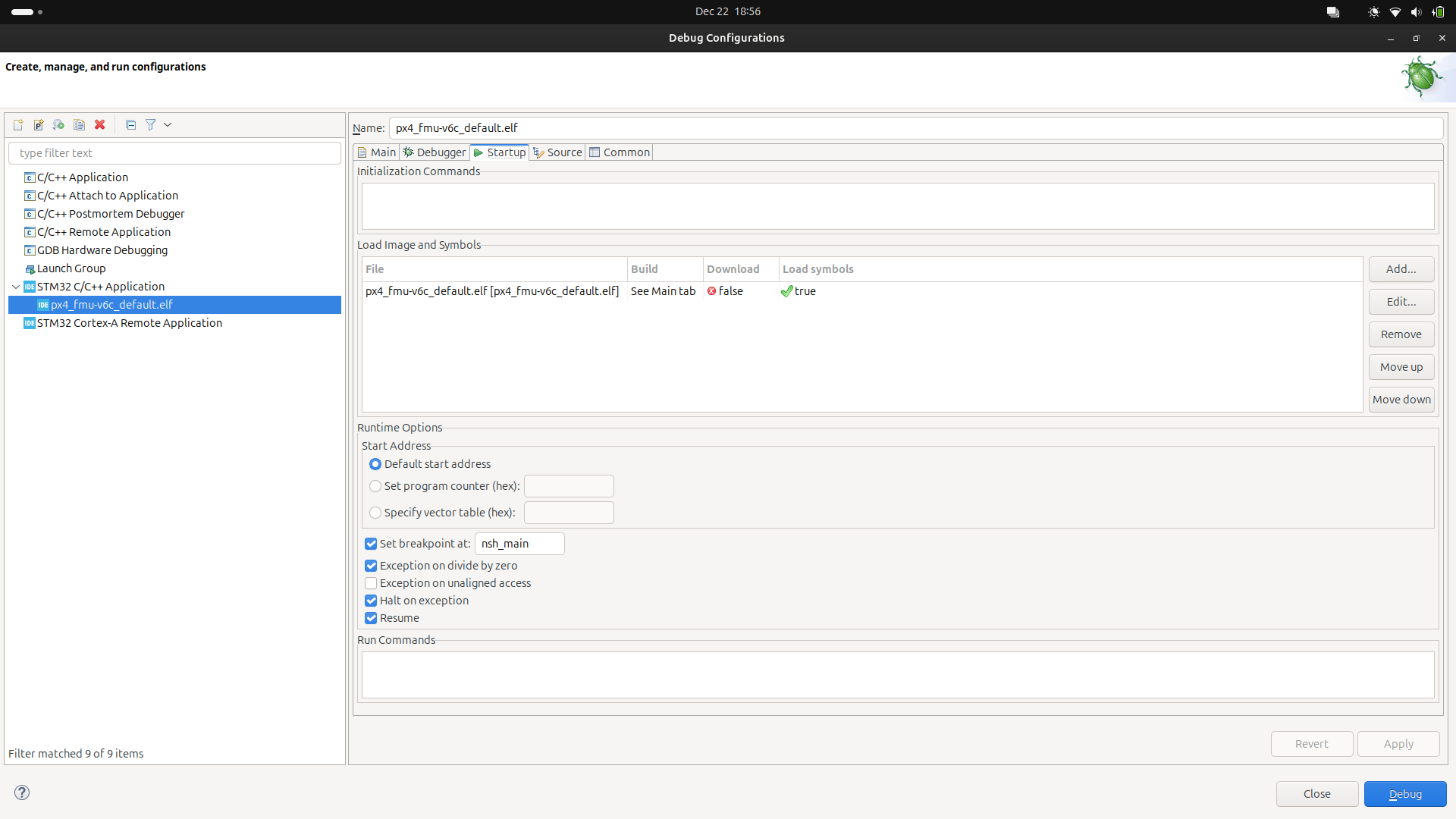
Startup #
Make sure to disable download and set to false